Payload Handler: Lifting

Payload Handler: Towing – Lifting – Hooking

Payload Handler: Lifting

Payload Handler: Lifting

Payload Handler: Direct

Payload Handler: Lifting

GA-MS-S-50

GA-REF-S
 SA-RIO-SW 01")
SA-RIO-SW

SA-RIO-CW

SA-HG-TG

DFLEET





Allows user to draw and plan topological map for Zalpha
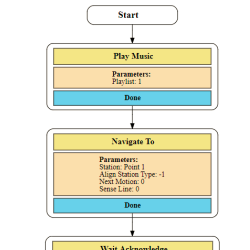
Zalpha programming software using simple flowchart system.
Automatically charges itself to ensure 24-hour continuous operation.

Able to move both forward and reverse.

Additional 8 inputs and 8 outputs to meet user’s applications.

Zalpha is IoT – enabled to meet industry 4.0 requirements.

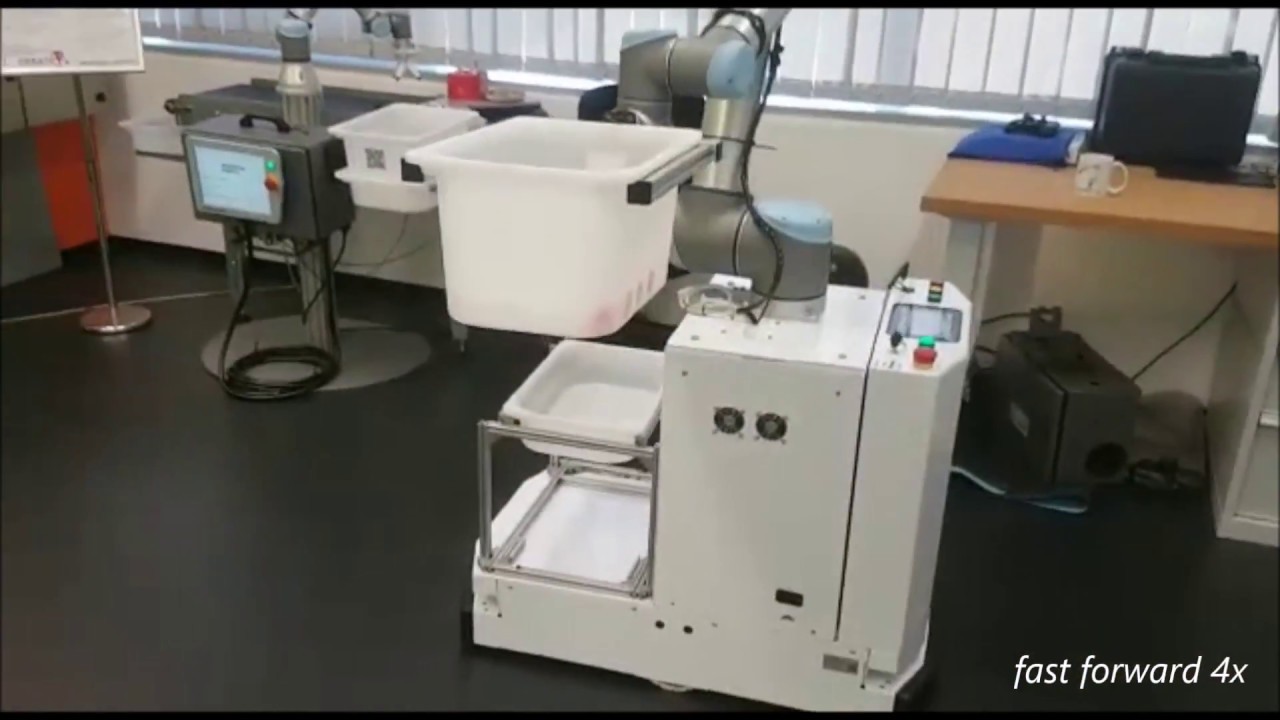
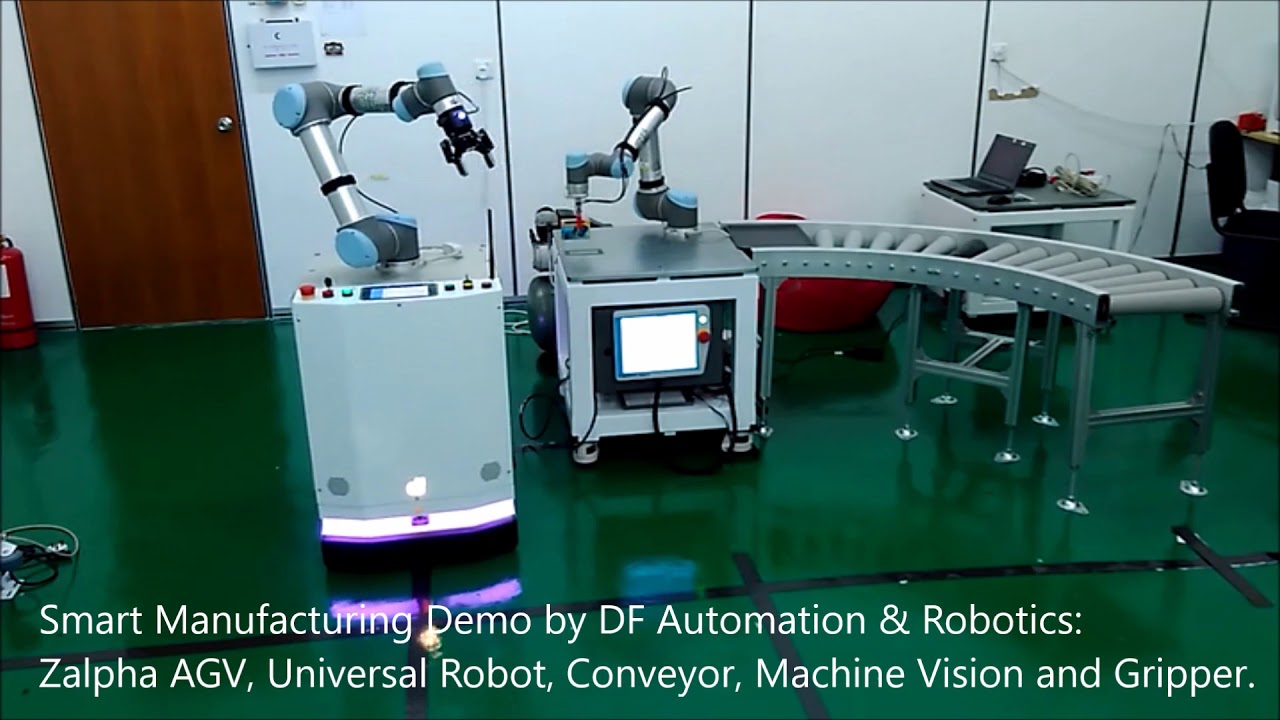
Pick and place application to transfer goods from one place to another.

Applicable to attend goods from one machine to another

Perform vision inspection without having fix fixture
DIMENSION |
|
|---|---|
| Base Length | Body: 698 mm, Bumper-to-bumper: 787 mm |
| Base Height | 803mm |
| Base Width | 550 mm |
| Clearance from Ground | 21 mm |
| Load Surface | Length: 820 mm, Width: 550 mm |
| Driving Wheel | Diameter: 150mm, Width: 35mm |
| Caster Wheel | Diameter: 75mm, Width: 45mm |
| PAYLOAD | |
| Carry Payload | 300 kg |
| UR Payload Compatible Model | UR5, UR10, UR15 |
| DRIVING AND NAVIGATION | |
| Driving System | 2-Wheel Differential Drive |
| Navigation System | TB: Bottom Laser-based Natural Feature Navigation |
| Navigation Direction | Forward, Reverse, Turning around centre of two driving wheels |
| Suspension | Passive |
| Minimum Turning Radius | 0 mm |
| Minimum Width for Pivoting | 1100 mm |
| Minimum Safety Clearance of Width | 500 mm |
| Minimum Safety Clearance of Height | 2100 mm |
| PERFORMANCE | |
| Maximum Speed | 1 m/s (3.6 km/h) |
| Stopping Accuracy | Laser Sensor (Natural Feature): ±100mm, ±2° Magnetic Tape: ±10mm, ±2° |
| Traversable Gap | 5 mm |
| Traversable Step | 5 mm |
| Maximum Gradeability | 3% / 1.72° |
| POWER | |
| Running Time (90% to 10%) | 10 hours |
| Charging Time (10% to 90%) | 2 hours |
| Charging Time : Running Time Ratio | 1.5 |
| Charging Method | Manual Charge: Through cable (Safety brake will be triggered) Auto Charge: Dock charging through charging station |
| Battery Type | LiFePO4 |
| Battery Weight | 40 kg |
| Battery Voltage | 25.6 V |
| Battery Capacity | 130 AH |
| SAFETY | |
| Emergency Switch | 1 Unit |
| Safety Laser Scanner | 2 Units |
| Bumper | 2 Units |
| External Safety I/Os | 1 Input, 1 Output |
| ENVIRONMENT | |
| Ambient Temperature Range | 5 ~ 40°C |
| Humidity | 10 ~ 95% |
| Operating Environment | Indoor usage with no excessive dust or corrosive gases |
| Floor Requirement | Level surface or concrete |
| IP Class | IP20 |
| INTERFACE | |
| Language | English |
| Operating System | NavWiz |
| Screen | 7″, 1280×800 pixels, 262K color screen capacitive touchscreen |
| Button & Switch | ON/OFF Button: Power Logo Green, Start Button: Green, Mode Button: Yellow, Stop Button: Red, On Button: Green with LED, Hard Reset Button: Key Type |
| Communications | 802.11 ac/a/b/g/n, 2.4GHz / 5GHz Dual-Band WiFi Open WPA & WPA2 Personal WPA & WPA2 Enterprise |
| Additional I/Os | Digital I/O : 8 Input, 8 Output, Digital Output Power: 36W, 24V, 250mA Max |
| Power for Payload Handler | 24VDC / 10A |