SA-RIO-SW 01")










NavWiz or Navigation Wizard is a software application for Autonomous Mobile Robot (AMR) and Automated Guided Vehicle (AGV). NavWiz has all the features required in a modern autonomous mobile robot, such as to program the robot, status monitor, smart navigation, AI and IoT enabled. NavWiz is developed by DF and it is the core of the intelligence behind all AMR and AGV from DF. NavWiz has won multiple awards and recognition in national and international.
NavWiz first released in 2016 and there are continuous ongoing new features and technologies improvement addition throughout the year to stay relevant in this fast moving technology era.
NavWiz is a software hosted in DF robots. It provides browser-based user interface to the users. It can be accessed from any devices such as laptops, tablets or phones regardless of the device operating system through the standard internet browser.
There are 3 main elements in NavWiz which are the Mapping and Routing, Task Programming and Task Runner.
Mapping and Routing
Mapping is the configuration of the sitemap for NavWiz to understand the area for navigation. During the setup, the AMR needs to be brought around to capture the surrounding features and form the map. Once the map is formed, it will be used by NavWiz as the reference for AMR localisation. Mapping is a one time job and doesn’t require revisiting again, unless there is a major change in the layout of the navigation area. Figure 2 illustrates the map generated after the mapping.

Routing is the configuration of the AMR running path, by just drawing the lines on NavWiz. Routing can be done for two types of robots which are tracked AGV and trackess AMR.
For tracked AGV, it navigates purely based on the guidance of magnetic strip and the AGV position is determined from the magnetic tapes junctions. Figure 3 illustrates the routing of a tracked AGV on NavWiz.

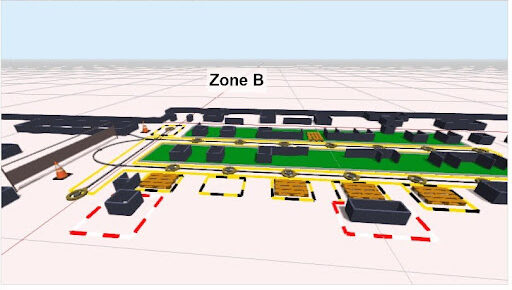
For trackless AMR, routing is done on top of the map generated from Mapping. The AMR will navigate based on the path with the reference to the surrounding natural features. Users can mark the position of the Stations on the path. By doing this, AMR will know it’s starting point and the destination, at the same time identify its current position by comparing the surrounding features with the map features. Figure 4 shows the mapping and routing of the trackless AMR.

Task Programming
Task Programming is the part to program the robot to perform the tasks or actions as required by the user. The programming is a graphical flowchart. It can create tasks. By just clicking and dragging the lines connecting the Tasks together, the AGV will know the sequence of the tasks and it can also make simple decisions based on specific conditions.
With the mapping and routing in place, users can program the robot to move from station to station. A complete AMR application, for example, delivery of raw material trolley from Warehouse to the Assembly Lines; consists of multiple Tasks. To break it down, the first Task will be AMR moving from charging station to Warehouse, second Task will be collecting the raw material trolley, the third Task will be delivery of the trolley to the assembly line and finally, the last Task is leaving the trolley at the assembly line and go back to the charging station.
Each Task is a single specific AMR action. In order to program the AMR to perform a complete meaningful application, all these Tasks need to be linked together. The compilation of multiple tasks to form a complete AMR application is called Task Template.
Figure 5 shows the standard Task Template in NavWiz.
More importantly, there is a list of closed to 100 standard library blocks which can be used to speed up the development process. Standard actions such as “Navigate to Station”, “Wait for Button”, “Read IO”, “Write IO”, “Play Music”…etc, can be found from the list and imported into the task template. With this flowchart based programming method, users do not have to work on low level programming anymore, making the programming of DF robots easier, flexible and more expandable.

Task Runner
After completing the mapping and task template, users can find the list of the task templates on the Task Runner page (Figure 6). Each time the AMR can only execute one task template, the next task template triggered will be queued under the queuing list. The supervisor is able to set the priority for each queuing task template, as well as removing the task template from the queuing list if it’s necessary.
Once the task template is completed, it will be logged into the AMR system as the record for tracing. Users can find the daily, weekly or even monthly completed task template from the History tab and Report page.
NavWiz provides a graphical reporting page (Figure 7) for users to view, as well as to download the performance of the AMR into CSV format for easier reporting and review.


Other Features
Other than the 3 main elements, NavWiz features some handy applications to help with the operation of the AGV system (Figure 8).

Engineers can perform Action Test, Calibration, Hardware Test, Homing, Manual Line Follow and Wifi Test to assist in the routine maintenance activities.
Besides, users can check the robot’s current map and the real time scanning profile through the Map tab. Status tab is where the users can observe the robot’s condition which includes CPU power consumption, Line Sensor Status, Power Condition and much more. (Figure 9).

NavWiz is being used by all robots from DF, from the smallest FDR Sushi Delivery Robot, to the Titan heavy duty 1 Tonne Autonomous Mobile Robot. With this NavWiz software, the method of programming of the Robots is the same, regardless of its model and physical outlook.
The software is still evolving in time to suit the customer needs. With the NavWiz components and IoT infrastructure in place, the development design cycle is being shortened significantly.
In advance of industrial 4.0 application, The next major improvement of NavWiz will be focusing more on the big data collection and visualisation.

Get a closer view on the NavWiz features and the programming of DF AMR robots from the video below!